Meet Blossom! She's our robot. We built and programmed her from scratch. She has the abilitity to complete a maximum of 350 points. This robot has alot of advantages: it's well balanced due to the main weight is put in the center, we use 4 engines and 3 sensors and we also attached thin wheels on each corner of the robot so we would trust its adjustment on the wall. Along with a simple robot comes simple programming, our programming is very easy to read and very easy to design.
Run 1
Our plan for the first run turns out being, complicated due to that we are planning to complete obstacles all over the board. The obstacles we plan to do are (in order): adapting to changing conditions, engagement, sports, using the right senses. Overall, with a successful run, our total points would be 135 points.

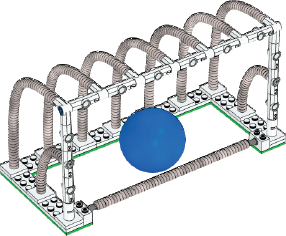
The image on the left is an attacher we built made to throw the ball in the goal (the image on the left). In this task tere arwe two situations, a situation in which if you just throw the ball you get 30 points, however you may throw the ball and if the ball lands in the goal the pointage will be 60. As a matter of fact, we only use one attachment which is the ball thrower.
Run 2
Our plan for the second run is pretty simple. All the tasks we are basing our second run are located in the east side of the map. The obstacles we chose to do for the second run are: We leave the base and head over to the "remote communication", we pull the triger backwards and head to the "community learning" in which we grab the loop and exit it from the box. After that, we program the robot to the "using our senses " where we have already pushed the sign (in the first run)but now we take th loop. Later that task, we move on to the "reverse engineering" in which we grab the basket, then we head over to the "robotics competition" in which we insert the object and collect the loop. If the run is fully functional, we would gain from the run a total of 150 points.